控制回路PID参数自动整定系统,是指在控制器规律已经确定为PID形式的情况下,通过调整PID控制器参数(比例系数KP、积分时间TI、微分时间TD),使得由被控对象、控制器等组成的控制回路的动态特性,满足期望的指标要求,达到理想的控制效果。一种好的PID控制器参数整定法,不仅可以减少操作人员的负担,还可以使控制系统处于最佳的运行状态。
在工业过程控制领域,简单的PID问题可以解决90%的控制问题,然而在实际实施过程中,并不会对控制参数的工作效能进行实时的纠正,仅在控制系统发生问题时,才会不得不重新调整参数值。因此,很多工业现场的控制系统都处在“非最优”的工作状态,甚至是整定不当的,这就严重影响了控制系统的控制品质。
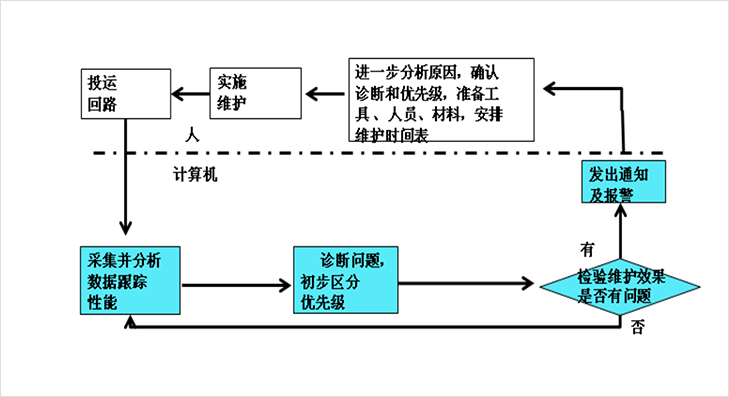
主要功能
-
 在线模型
在线模型- 提供在线开环和闭环模型
-
 辨识与仿真模拟功能
辨识与仿真模拟功能- 自动采集回路数据,获得状态空间模型,并转化为传递函数模型
-
 自动捕捉和建模
自动捕捉和建模- 自动捕捉阶跃变动信息,自动建模并计算PID参数。
-
 仿真环境
仿真环境- 提供仿真环境,在PID参数真正实施前进行仿真比较,了解并比较整定功效
-
 日志记录
日志记录- 回路整定历史报告与PID日志记录